





บัฟเฟอร์และไอซีไดรเวอร์ใช้เพื่อป้องกันสัญญาณเพิ่มความแรงของไดรฟ์และควบคุมโหลดในวงจรอิเล็กทรอนิกส์ บัฟเฟอร์ส่วนใหญ่ช่วยปรับปรุงการแยกสัญญาณ พัดลมออก และความสมบูรณ์ของสัญญาณ ในขณะที่ไดรเวอร์จ่ายกระแสหรือแรงดันไฟฟ้าที่สูงขึ้นสําหรับรีเลย์, LED, MOSFET, มอเตอร์, ร่องรอยยาว หรือสายสื่อสาร บทความนี้เปรียบเทียบบัฟเฟอร์กับไอซีไดรเวอร์ ประเภท การใช้งาน การใช้การสื่อสารที่แตกต่าง และปัจจัยการเลือก
ค 1. บัฟเฟอร์/ไดรเวอร์คืออะไร?
ค 2. บัฟเฟอร์/ไดรเวอร์ทํางานอย่างไร
ค 3. ประเภทของบัฟเฟอร์และวงจรไดรเวอร์
ค 4. การใช้งานทั่วไปของบัฟเฟอร์และไดรเวอร์
ค 5. ไดรเวอร์การสื่อสารและดิฟเฟอเรนเชียล
ค 6. วิธีเลือกบัฟเฟอร์หรือไดรเวอร์ IC
ค 7. คําถามที่พบบ่อย [FAQ]

บัฟเฟอร์/ไดรเวอร์คืออะไร?
บัฟเฟอร์/ไดรเวอร์เป็นวงจรอิเล็กทรอนิกส์ที่ใช้ในการถ่ายโอนสัญญาณจากส่วนหนึ่งของระบบไปยังอีกส่วนหนึ่งโดยไม่ทําให้วงจรต้นทางอ่อนแอ ล่าช้า หรือโอเวอร์โหลด ช่วยรักษาความสมบูรณ์ของสัญญาณเมื่อสัญญาณผ่านร่องรอย PCB สายเคเบิล บัส หรืออุปกรณ์ที่เชื่อมต่อหลายเครื่อง
บัฟเฟอร์ส่วนใหญ่จะแยกขั้นตอนวงจรหนึ่งออกจากอีกขั้นตอนหนึ่งและลดผลกระทบในการโหลด ไดรเวอร์จะเพิ่มความสามารถของกระแสหรือแรงดันไฟฟ้าของสัญญาณเพื่อให้วงจรควบคุมพลังงานต่ําสามารถขับเคลื่อนโหลดที่ใหญ่ขึ้นโหลดที่เร็วขึ้น LED รีเลย์ MOSFET มอเตอร์หรือสายสื่อสาร แม้ว่าบัฟเฟอร์และไดรเวอร์จะทํางานต่างกัน แต่ไอซีจํานวนมากก็รวมคุณสมบัติทั้งสองไว้ในอุปกรณ์เดียว
ตัวอย่างเช่น พินไมโครคอนโทรลเลอร์ไม่ควรขับเคลื่อนมอเตอร์ รีเลย์ หรือสายสัญญาณยาวโดยตรง ไดรเวอร์หรือบัฟเฟอร์จัดการโหลดไฟฟ้าในขณะที่ปกป้องคอนโทรลเลอร์และรักษาสัญญาณให้คงที่
| รายการ | บัฟเฟอร์ | คนขับรถ | ||||
|---|---|---|---|---|---|---|
| วัตถุประสงค์หลัก | แยกและรักษาคุณภาพสัญญาณ | Syngis เพิ่มความสามารถในการขับเคลื่อนกระแสไฟฟ้าหรือแรงดันไฟฟ้า | Synology Inc. | |||
| โหลดทั่วไป | อินพุตลอจิก บัส เส้นนาฬิกา | มิซูมิ ประตู MOSFET, ไฟ LED, รีเลย์, มอเตอร์, สายเคเบิลยาว | มิซูมิ | |||
| ความแข็งแรงของเอาต์พุต | ปานกลาง | สูงกว่า | ||||
| ข้อกังวลหลัก | กําลังโหลด พัดลมออก ความสมบูรณ์ของสัญญาณ | Synology Inc. กระแสไฟฟ้าความร้อนความเร็วในการสลับการป้องกัน | ||||
| ตัวอย่างทั่วไป | 74HC125, 74HC244, SN74LVC ซีรีส์ | มิซูมิ ULN2003, ไดรเวอร์ MOSFET, ไดรเวอร์ RS-485, ไดรเวอร์มอเตอร์ | มิซูมิ | |||
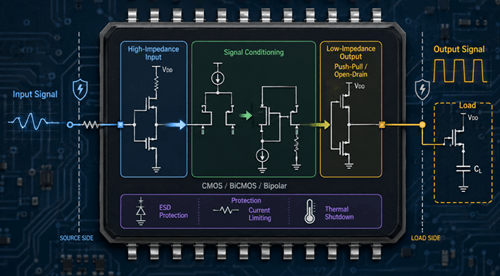 | ||||||
| บัฟเฟอร์/ไดรเวอร์ทํางานโดยรับสัญญาณอินพุตและทําซ้ําที่เอาต์พุตด้วยความแข็งแรง เสถียรภาพ และความสามารถในการขับเคลื่อนโหลดที่ดีขึ้น ภายในอุปกรณ์ ขั้นตอนที่ใช้ทรานซิสเตอร์จะประมวลผลสัญญาณโดยใช้เทคโนโลยี CMOS, BiCMOS หรือไบโพลาร์ ขึ้นอยู่กับความเร็ว แรงดันไฟฟ้า และกระแสที่ต้องการ ด้านอินพุตมักจะมีอิมพีแดนซ์สูง ซึ่งหมายความว่าจะดึงกระแสน้อยมากจากวงจรต้นทาง ลดการบิดเบือนของรูปคลื่น และทําให้สัญญาณต้นฉบับมีเสถียรภาพ | ||||||
| หลังจากได้รับสัญญาณบัฟเฟอร์ / ไดรเวอร์จะปรับสภาพและส่งผ่านไปยังขั้นตอนเอาต์พุตที่ออกแบบมาเพื่อรองรับโหลด ขั้นตอนการส่งออกนี้มักจะเป็นอิมพีแดนซ์ต่ําและอาจใช้โครงสร้างแบบกดดึงหรือท่อระบายน้ําแบบเปิด เอาต์พุตแบบกดดึงสามารถจัดหาและจมกระแส ซึ่งช่วยเพิ่มพัดลมออก เวลาเพิ่มขึ้น เวลาตก และประสิทธิภาพการสลับ ในวงจรไดรเวอร์ที่แข็งแกร่งขึ้นสเตจเอาต์พุตยังสามารถให้กระแสไฟสูงสุดสูงสําหรับโหลดแบบ capacitive เช่นเกต MOSFET หรือ IGBT | ||||||
| บัฟเฟอร์/ไดรเวอร์ยังแยกวงจรต้นทางออกจากโหลด ดังนั้นการเปลี่ยนแปลงความจุ ความต้องการกระแส หรือสัญญาณรบกวนทางไฟฟ้าจึงไม่รบกวนสัญญาณเดิมโดยตรง อุปกรณ์ที่ทันสมัยจํานวนมากมีคุณสมบัติการป้องกัน เช่น การป้องกัน ESD การจํากัดกระแสไฟ และการปิดระบบระบายความร้อนเพื่อเพิ่มความน่าเชื่อถือ ในระบบความเร็วสูง ประสิทธิภาพขึ้นอยู่กับความล่าช้าในการแพร่กระจาย เวลาเพิ่มขึ้น และเวลาตก เนื่องจากสิ่งเหล่านี้เป็นตัวกําหนดว่าสัญญาณสามารถเคลื่อนย้ายจากอินพุตไปยังเอาต์พุตได้เร็วและแม่นยําเพียงใด | ||||||
| วงจรบัฟเฟอร์และไดรเวอร์ที่แตกต่างกันได้รับการออกแบบมาสําหรับระดับแรงดันไฟฟ้าเฉพาะความเร็วในการสลับสภาพสัญญาณและความต้องการโหลด บางตัวใช้เพื่อทําความสะอาดและเสริมความแข็งแกร่งของสัญญาณลอจิกดิจิทัล ในขณะที่บางตัวให้กระแสที่จําเป็นในการขับเคลื่อนบัส ไฟ LED มอเตอร์ ทรานซิสเตอร์กําลัง หรือเส้นทางการสื่อสารความเร็วสูง | ||||||
| ประเภท | ฟังก์ชั่นหลัก | การใช้งานทั่วไป | ตัวอย่างอุปกรณ์ | |||
| ลอจิกบัฟเฟอร์ | เสริมความแข็งแกร่งหรือแยกสัญญาณลอจิกดิจิทัล | Synology Inc. เอาต์พุต MCU, อินเทอร์เฟซ FPGA, เส้นนาฬิกา, บัสดิจิตอล | 74HC125, 74HC244, SN74LVC ซีรีส์ | มิซูมิ | ||
| บัฟเฟอร์ไตรสเตต | เพิ่มสถานะเอาต์พุต HIGH, LOW และอิมพีแดนซ์สูง | บัสที่ใช้ร่วมกัน ระบบหน่วยความจํา อินเทอร์เฟซไมโครโปรเซสเซอร์ | Synology Inc. 74HC125, 74HC244 | 74HC125, 74HC244 | 74HC125, 74HC244 | 74HC1 |
| คนขับรถบัส ขับเคลื่อนบัสดิจิทัลขนาดใหญ่หรืออินพุตลอจิกหลายตัว บัสโปรเซสเซอร์, อินเทอร์เฟซหน่วยความจํา, การกําหนดเส้นทางสัญญาณ FPGA | Synology Inc. 74LVC245, 74HC245 | 74LVC245 | 74LVC245 | 74LVC245, 74HC245 | 74L | |
| บัฟเฟอร์การเปลี่ยนระดับ | Silic ถ่ายโอนสัญญาณระหว่างแรงดันลอจิกที่แตกต่างกัน ระบบแรงดันผสม 1.8V, 3.3V และ 5V | ซีรีส์ TXB/TXS, ซีรีส์ SN74LVC | มิซูมิ | |||
| โหลดไดรเวอร์ | ช่วยให้วงจรลอจิกควบคุมโหลดไฟฟ้าที่สูงกว่า รีเลย์, LED, โซลินอยด์, มอเตอร์ขนาดเล็ก | มิซูมิ ULN2003, ULN2803 | ||||
| ไดรเวอร์เกท | ไดรฟ์สวิตช์ไฟ MOSFET, IGBT, GaN หรือ SiC | MISUMI พาวเวอร์ซัพพลาย, มอเตอร์ไดรฟ์, อินเวอร์เตอร์, ระบบ EV | UCC27511, IR2110, ไดรเวอร์เกทแบบแยก | |||
| ไดรเวอร์ดิฟเฟอเรนเชียล ส่งสัญญาณผ่านลิงก์ที่มีเสียงดังหรือทางไกล | RS-485, CAN, LVDS, อีเธอร์เน็ต, เครือข่ายอุตสาหกรรม | MAX485 ซีรีส์ SN65HVD | MAX485 | |||
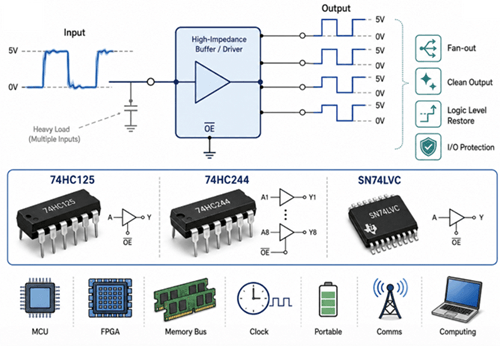 | ||||||
| บัฟเฟอร์ลอจิกดิจิตอลสร้างสัญญาณอินพุตที่เอาต์พุตในขณะที่ลดภาระไฟฟ้าบนวงจรต้นทาง มีประโยชน์เมื่อพิน MCU, โปรเซสเซอร์ หรือ FPGA หนึ่งตัวต้องขับเคลื่อนอินพุตลอจิกหลายตัว | ||||||
| บัฟเฟอร์ลอจิกช่วยรักษาระดับแรงดันไฟฟ้าสูงและต่ําที่ถูกต้อง ตระกูลลอจิกแรงดันต่ําที่ทันสมัยยังมีประโยชน์ในระบบขนาดกะทัดรัดที่ต้องการการทํางาน 1.8V, 2.5V หรือ 3.3V | ||||||
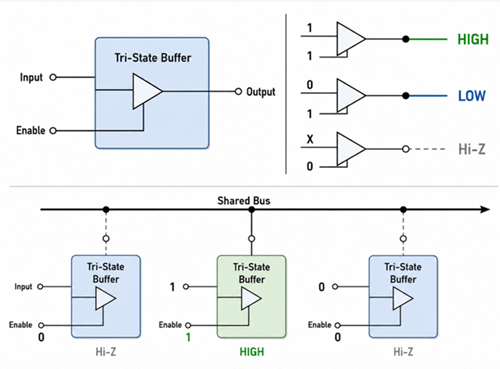 | ||||||
| บัฟเฟอร์ไตรสเตตมีสถานะเอาต์พุตสามสถานะ: ลอจิกสูง ลอจิกต่ํา และอิมพีแดนซ์สูง สถานะอิมพีแดนซ์สูงจะตัดการเชื่อมต่อเอาต์พุตจากบัสทําให้อุปกรณ์หลายเครื่องสามารถใช้สายสัญญาณเดียวกันได้โดยไม่ต้องต่อสู้กัน | ||||||
| คนขับรถบัสใช้เมื่อสัญญาณต้องขับเคลื่อนอินพุตจํานวนมากหรือเดินทางข้ามรถบัสดิจิทัลที่กว้างขึ้น พบได้ทั่วไปในระบบหน่วยความจํา อินเทอร์เฟซไมโครโปรเซสเซอร์ บอร์ด FPGA และสายข้อมูลที่ความแรงของสัญญาณและเวลาต้องคงที่ | ||||||
| บัฟเฟอร์การเปลี่ยนระดับจะใช้เมื่อสองวงจรทํางานที่แรงดันลอจิกต่างกัน ตัวอย่างเช่น เซ็นเซอร์ 1.8V อาจต้องสื่อสารกับ MCU 3.3V หรือคอนโทรลเลอร์ 3.3V อาจต้องเชื่อมต่อกับอุปกรณ์ต่อพ่วง 5V | ||||||
| หากไม่มีการเปลี่ยนระดับที่เหมาะสมสัญญาณอาจไม่ตรงตามเกณฑ์อินพุตของอุปกรณ์รับสัญญาณหรือปริมาตรที่สูงขึ้น tag ด้าน e อาจทําให้วงจรแรงดันไฟฟ้าที่ต่ํากว่าเสียหายได้ บัฟเฟอร์แบบเปลี่ยนระดับช่วยรักษาการสื่อสารเชิงตรรกะที่ปลอดภัยและถูกต้องระหว่างอุปกรณ์แรงดันไฟฟ้าผสม | ||||||
| ไอซีไดรเวอร์โหลดช่วยให้วงจรลอจิกพลังงานต่ําสามารถควบคุมโหลดกระแสไฟที่สูงขึ้นได้ พินไมโครคอนโทรลเลอร์ไม่สามารถขับเคลื่อนรีเลย์ โซลินอยด์ LED ความสว่างสูง หรือมอเตอร์ขนาดเล็กได้โดยตรง เนื่องจากโหลดเหล่านี้ต้องการกระแสไฟมากกว่าที่พินสามารถให้ได้อย่างปลอดภัย | ||||||
| อุปกรณ์ต่างๆ เช่น ULN2003 และ ULN2803 ใช้สเตจไดรเวอร์ทรานซิสเตอร์เพื่อรองรับกระแสโหลดที่สูงขึ้น มีประโยชน์ในบอร์ดรีเลย์การควบคุม LED วงจรขับเคลื่อนโซลินอยด์เฟสสเต็ปเปอร์มอเตอร์และระบบอัตโนมัติอย่างง่าย | ||||||
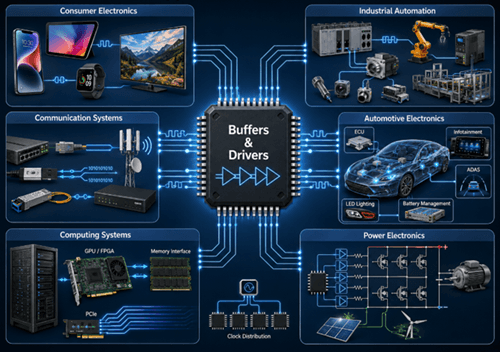
| บัฟเฟอร์และไดรเวอร์จะใช้เมื่อสัญญาณต้องการความสามารถในการขับเคลื่อนที่แข็งแกร่งขึ้นการแยกที่ดีขึ้นจังหวะเวลาที่สะอาดขึ้นหรือการควบคุมโหลดที่ปลอดภัยยิ่งขึ้น แอพพลิเคชั่นที่แตกต่างกันใช้ไดรเวอร์ประเภทต่างๆ ขึ้นอยู่กับความเร็วของสัญญาณ กระแสโหลด ระดับแรงดันไฟฟ้า และสภาพแวดล้อมเสียงรบกวน | ||||||
 | ||||||
| พื้นที่ใช้งาน | บัฟเฟอร์ทั่วไปหรือประเภทไดรเวอร์ | มิซูมิ ทําไมถึงใช้ | ||||
| ไมโครคอนโทรลเลอร์และวงจร GPIO | ลอจิกบัฟเฟอร์, บัฟเฟอร์การเปลี่ยนระดับ | มิซูมิ ปกป้องพิน MCU ปรับปรุงพัดลมออก และจับคู่ระดับแรงดันไฟฟ้าลอจิกที่แตกต่างกัน | ||||
| อินเทอร์เฟซ FPGA และโปรเซสเซอร์ | FPGA บัฟเฟอร์ลอจิก, ไดรเวอร์บัส, บัฟเฟอร์นาฬิกา | รักษาความแม่นยําของเวลาและลดภาระในสายการผลิตดิจิตอลความเร็วสูง | ||||
| บัสหน่วยความจําและข้อมูล | Synology Inc. บัฟเฟอร์ไตรรัฐคนขับรถบัส อนุญาตให้ควบคุมบัสที่ใช้ร่วมกันและป้องกันความขัดแย้งของสัญญาณระหว่างอุปกรณ์ | |||||
| ร่องรอย PCB และสายเคเบิลยาว | ไดรเวอร์สาย, ไดรเวอร์ดิฟเฟอเรนเชียล | เสริมความแข็งแกร่งของสัญญาณและลดความไวของสัญญาณรบกวนในระยะทาง | ||||
| RS-485, CAN และเครือข่ายอุตสาหกรรม | KUKA AG ไดรเวอร์ดิฟเฟอเรนเชียล, ตัวรับส่งสัญญาณ | มิซูมิ ปรับปรุงการปฏิเสธเสียงรบกวนและรองรับการสื่อสารที่เชื่อถือได้ในสภาพแวดล้อมที่สมบุกสมบัน | ||||
| ระบบควบคุม LED และรีเลย์ | โหลดไดรเวอร์, อาร์เรย์ทรานซิสเตอร์ | Synology Inc. อนุญาตให้สัญญาณลอจิกพลังงานต่ําควบคุมโหลดกระแสไฟฟ้าที่สูงขึ้น | ||||
| การสลับ MOSFET และ IGBT | MOSFET ไดรเวอร์เกท | ให้กระแสไฟสูงสุดสําหรับการสลับที่รวดเร็วและลดการสูญเสียพลังงาน | ||||
| ระบบควบคุมมอเตอร์และอุปกรณ์อิเล็กทรอนิกส์กําลัง | คนขับมอเตอร์, คนขับประตู ควบคุมการไหลของกระแสไฟฟ้า ความเร็วในการสลับ แรงบิด และฟังก์ชันการป้องกัน | มิซูมิ | ||||
| อุปกรณ์อิเล็กทรอนิกส์ยานยนต์ ไดรเวอร์ CAN, ไดรเวอร์เกท, ไดรเวอร์โหลด | รองรับสภาพแวดล้อมที่มีเสียงดัง การควบคุมแบบกระจาย และโหลดไฟฟ้ากระแสสูง | |||||
| พาวเวอร์ซัพพลายและอินเวอร์เตอร์ | ไดรเวอร์เกท MOSFET, IGBT, GaN หรือ SiC | MOSFET ปรับปรุงประสิทธิภาพการสลับ ประสิทธิภาพการระบายความร้อน และการควบคุมพาวเวอร์สเตจ | มิซูมิ | |||
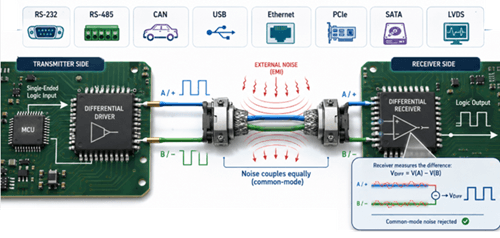 | ||||||
| ไดรเวอร์การสื่อสารและดิฟเฟอเรนเชียลจะใช้เมื่อสัญญาณต้องเดินทางผ่านสายเคเบิล ขั้วต่อ ร่องรอย PCB ยาว หรือสภาพแวดล้อมที่มีเสียงดังทางไฟฟ้า แทนที่จะส่งสัญญาณเป็นแรงดันไฟฟ้าเดียวที่อ้างอิงถึงกราวด์หลายระบบใช้การส่งสัญญาณดิฟเฟอเรนเชียลโดยที่เครื่องรับจะวัดความแตกต่างของแรงดันไฟฟ้าระหว่างสายสัญญาณเสริมสองสาย | ||||||
| วิธีนี้ช่วยปรับปรุงการปฏิเสธสัญญาณรบกวน ลดการรบกวนในโหมดทั่วไป และรองรับการถ่ายโอนข้อมูลที่เสถียรในระยะทางไกลหรือที่ความเร็วสูงขึ้น | ||||||
| ในการส่งสัญญาณปลายเดียว สัญญาณรบกวนบนพื้นดินอ้างอิงหรือสายสัญญาณสามารถรบกวนแรงดันไฟฟ้าที่ได้รับได้โดยตรง ในการส่งสัญญาณดิฟเฟอเรนเชียลสัญญาณรบกวนภายนอกมักจะจับคู่เป็นทั้งสองบรรทัดในลักษณะเดียวกัน เนื่องจากเครื่องรับอ่านความแตกต่างระหว่างสองบรรทัดเสียงทั่วไปส่วนใหญ่จึงถูกปฏิเสธ นี่คือเหตุผลที่ไดรเวอร์ดิฟเฟอเรนเชียลถูกนํามาใช้กันอย่างแพร่หลายในระบบอุตสาหกรรมยานยนต์คอมพิวเตอร์และการสื่อสาร | ||||||
| อินเตอร์เฟซ | ประเภทไดรเวอร์ทั่วไป | ข้อได้เปรียบหลัก | ||||
| RS-485 | มิซูมิ ไดรเวอร์สายดิฟเฟอเรนเชียล | การสื่อสารทางอุตสาหกรรมทางไกลและทนต่อเสียงรบกวน | มิซูมิ | |||
| สามารถ | ตัวรับส่งสัญญาณดิฟเฟอเรนเชียล | การสื่อสารเครือข่ายยานยนต์และอุตสาหกรรมที่แข็งแกร่ง | Synology Inc. | |||
| LVDS | LVDS | ไดรเวอร์ดิฟเฟอเรนเชียลแรงดันต่ํา | มิซูมิ การส่งสัญญาณระดับบอร์ดความเร็วสูงและเสียงรบกวนต่ํา | Synology Inc. | ||
| ยูเอสบี | ไดรเวอร์สัญญาณดิฟเฟอเรนเชียล | มิซูมิ การถ่ายโอนข้อมูลแบบอนุกรมที่เชื่อถือได้ | ||||
| อีเธอร์เน็ต | การส่งสัญญาณเลเยอร์ทางกายภาพที่แตกต่าง | การสื่อสารด้วยสายเคเบิลยาวและการเชื่อมต่อเครือข่าย | ||||
| PCIe / SATA | ประเทศไทย ไดรเวอร์ดิฟเฟอเรนเชียลความเร็วสูง | Synology Inc. อัตราข้อมูลสูงและความสมบูรณ์ของสัญญาณที่ควบคุมได้ | ||||
| การเลือกบัฟเฟอร์หรือไดรเวอร์ IC ที่เหมาะสมขึ้นอยู่กับแหล่งสัญญาณ ประเภทโหลด ระดับแรงดันไฟฟ้า ความเร็วในการสลับ กระแสไฟขาออก และสภาพแวดล้อม PCB บัฟเฟอร์ลอจิกมักใช้เพื่อป้องกันและเสริมความแข็งแกร่งของสัญญาณในขณะที่ไดรเวอร์จะใช้เมื่อวงจรต้องควบคุมโหลดที่หนักกว่าร่องรอยที่ยาวขึ้นสายเคเบิลประตู MOSFET รีเลย์ไฟ LED หรือมอเตอร์ | ||||||
| ความต้องการการออกแบบ | ทางเลือกที่ดีกว่า สิ่งที่ต้องตรวจสอบ | |||||
| สัญญาณเดียวขับเคลื่อนอินพุตลอจิกหลายตัว ลอจิกบัฟเฟอร์ | พัดลมออก, ความจุอินพุต, กระแสไฟขาออก | |||||
| อุปกรณ์หลายเครื่องใช้บัสเดียวกัน | บัฟเฟอร์ไตรสเตต | เปิดใช้งานการควบคุม สถานะอิมพีแดนซ์สูง ความเสี่ยงจากความขัดแย้งของบัส | Synology Inc. | |||
| MCU หรือ FPGA เชื่อมต่อกับระดับแรงดันไฟฟ้าที่แตกต่างกัน บัฟเฟอร์การเปลี่ยนระดับ | Silic ช่วงแรงดันไฟฟ้าอินพุต / เอาต์พุต, เกณฑ์ลอจิก | มิซูมิ | ||||
| สัญญาณเดินทางผ่านร่องรอย PCB ยาว | คนขับรถบัสหรือคนขับรถสาย ความแข็งแรงของไดรฟ์, ความล่าช้าในการแพร่กระจาย, การสิ้นสุด | มิซูมิ | ||||
| สัญญาณเดินทางผ่านสายเคเบิลหรือสภาพแวดล้อมที่มีเสียงดัง ไดรเวอร์ดิฟเฟอเรนเชียล RS-485, CAN, LVDS, การป้องกันเสียงรบกวน, ความยาวสายเคเบิล | มิซูมิ | |||||
| ลอจิกพินควบคุมรีเลย์ LED หรือโซลินอยด์ | มิซูมิ โหลดไดรเวอร์ | กระแสไฟขาออก, แคลมป์ไดโอด, การกระจายความร้อน | ||||
| สัญญาณ PWM ควบคุม MOSFET หรือ IGBT | MOSFET ไดรเวอร์เกท | กระแสไฟสูงสุด, แรงดันไฟฟ้าเกต, ความเร็วในการสลับ | ||||
| นาฬิกาความเร็วสูงหรือสัญญาณข้อมูลต้องการจังหวะที่สะอาด | Synology Inc. บัฟเฟอร์ความเร็วสูง | เอียง, กระวนกระวายใจ, เวลาขึ้น/ลง, คุณภาพเลย์เอาต์ |
สําหรับสัญญาณลอจิกอย่างง่าย ให้ตรวจสอบความเข้ากันได้ของแรงดันไฟฟ้าและพัดลมออกก่อน สําหรับโหลดกระแสสูงหรือความเร็วสูง ให้ตรวจสอบกระแสไฟขาออก ระดับความร้อน ความล่าช้าในการแพร่กระจาย ความเร็วขอบสลับ และข้อกําหนดด้านเค้าโครง
การแก้ไขปัญหา
| ปัญหาทั่วไป | สาเหตุ | เอฟเฟกต์ | โซลูชั่น | |
|---|---|---|---|---|
| เสียงเรียกเข้าและการสะท้อนสัญญาณ | การสิ้นสุดที่ไม่เหมาะสมหรืออิมพีแดนซ์ไม่ตรงกัน | ความผิดเพี้ยนของสัญญาณและข้อผิดพลาดในการสื่อสาร | Synology Inc. ใช้การสิ้นสุดที่เหมาะสมและการกําหนดเส้นทางอิมพีแดนซ์ที่ควบคุมได้ | |
| ไดรเวอร์ร้อนเกินไป กระแสไฟมากเกินไป การระบายความร้อนไม่ดี หรือการจัดอันดับแพ็คเกจไม่เพียงพอ การปิดระบบระบายความร้อนหรือความล้มเหลวของอุปกรณ์ | ลดกระแสโหลด ปรับปรุงการกระจายความร้อน หรือเลือกไดรเวอร์ที่มีคะแนนสูงกว่า | |||
| ข้อผิดพลาดด้านเวลา | ความล่าช้าในการแพร่กระจายมากเกินไป เอียง หรือการกําหนดเส้นทางไม่ดี | ความล้มเหลวในการซิงโครไนซ์และข้อผิดพลาดของข้อมูล | Synution Thailand ใช้ไดรเวอร์ที่เร็วขึ้น จับคู่ความยาวการติดตาม และเพิ่มประสิทธิภาพการกําหนดเส้นทาง | Synology Inc. |
| เสียงรบกวนและ EMI | การต่อสายดินไม่ดี อัตราคมตัดที่รวดเร็ว หรือการแยกส่วนที่อ่อนแอ | Synology Inc. สัญญาณเสียหายและการรบกวน | Synus Thailand ปรับปรุงการต่อสายดิน การป้องกัน การแยกส่วน และการแยกเค้าโครง |
คําถามที่พบบ่อย [FAQ]
ไตรมาสที่ 1 การกระจายออกส่งผลต่อการเลือกบัฟเฟอร์หรือไดรเวอร์อย่างไร
พัดลมออกสูงจะเพิ่มความจุโหลดและความต้องการในปัจจุบัน บัฟเฟอร์ลอจิกช่วยให้สัญญาณเดียวขับเคลื่อนอินพุตหลายรายการโดยไม่มีระดับลอจิกที่อ่อนแอ ขอบช้า หรือเวลาไม่เสถียร
ไตรมาสที่ 2 เมื่อใดควรใช้บัฟเฟอร์ไตรสเตตแทนบัฟเฟอร์มาตรฐาน
ใช้บัฟเฟอร์ tri-state เมื่ออุปกรณ์หลายเครื่องใช้บัสเดียวกัน สถานะอิมพีแดนซ์สูงจะตัดการเชื่อมต่อเอาต์พุตและป้องกันไม่ให้อุปกรณ์สองเครื่องขับเคลื่อนสายพร้อมกัน
ไตรมาสที่ 3 เหตุใดร่องรอยหรือสายเคเบิลที่ยาวจึงมักต้องใช้ไดรเวอร์สายหรือไดรเวอร์ดิฟเฟอเรนเชียล
เส้นทางสัญญาณยาวเพิ่มความจุการรับสัญญาณรบกวนอิมพีแดนซ์ไม่ตรงกันและการสูญเสียสัญญาณ ไดรเวอร์สายเสริมความแข็งแกร่งของสัญญาณ ในขณะที่ไดรเวอร์ดิฟเฟอเรนเชียลช่วยปรับปรุงการปฏิเสธสัญญาณรบกวนในระยะทาง
ไตรมาสที่ 4 พารามิเตอร์ใดที่สําคัญที่สุดเมื่อเลือกบัฟเฟอร์หรือไดรเวอร์ IC
ตรวจสอบแรงดันไฟฟ้า, เกณฑ์ลอจิก, กระแสไฟขาออก, ความล่าช้าในการแพร่กระจาย, เวลาเพิ่มขึ้น/ลดลง, โครงสร้างเอาต์พุต, พิกัดแพ็คเกจ, ขีดจํากัดความร้อน และคุณสมบัติการป้องกัน
ไตรมาสที่ 5 เหตุใดไดรเวอร์ที่ไม่ถูกต้องจึงทําให้เกิดความร้อนสูงเกินไปหรือข้อผิดพลาดในการจับเวลา
ไดรเวอร์ที่มีกระแสไฟไม่เพียงพอระยะขอบความร้อนต่ําหรือความล่าช้าในการแพร่กระจายมากเกินไปอาจร้อนเกินไปสลับช้าเกินไปบิดเบี้ยวขอบหรือทําให้เกิดข้อผิดพลาดในการซิงโครไนซ์ในวงจรความเร็วสูง










